Рис. 1. Эскиз американского противоминного подводного аппарата ARMS

Рис. 2. Английский противоминный подводный аппарат "Минноу"
Рис. 3. Английский противоминный подводный аппарат "Микров"
Рис. 4. Схема западногерманского противоминного подводного аппарата "Пингвин-В3": 1 - электронный блок ГАС; 2 - вспомогательная батарея; 3 - электронные блоки систем управления и передачи данных; 4 - вертикальное подруливающее устройство; 5 - электронные блоки энергосиловой установки; 6 - серводвигатель; 7 - устройство крепления заряда ВВ; 8 - заряды ВВ; 9 - емкости балластной системы; 10 - основная электрическая батарея энергосиловой установки; 11 - эхолот; 12 - телекамера; 13 - антенна ГАС; 14 - лампы подсветки; 15 - горизонтальный руль; 16 - двигатель
Рис. 5. Западногерманский аппарат "Пингвин-А1"
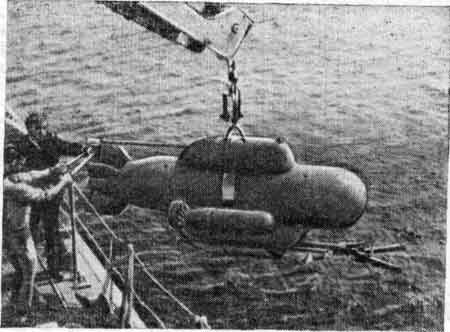
Рис. 6. Французский аппарат РАР-104
Рис. 7. Составные элементы и взаимозаменяемые модульные блоки системы РАР-104 Мк5: 1 - главный пульт управления; 2 - вспомогательный переносной пульт управления; 3 - бобина с кабелем; 4 - электродвигатель с винтом; 5 - подруливающее устройство; 6 __ взрывной резак; 7 - манипулятор; 8 - блок телекамер; 9 - головные части
Рис. 8. Итальянский аппарат MIN-77; 1 - гребной винт; 2 - резервуар гидропневмоаккумулятора; 3 - барабан с кабелем телеуправления; 4 - подруливающие устройства; 5 - навигационная аппаратура и электронные средства управления; 6 - модуль ГАС; 7 - модуль телекамеры: 8 - прожектор; 9 - взрывной резак; 10 - аккумуляторная батарея; 11 - балласт; 12 - заряд ВВ; 13 - модуль гидропневмоаккумулятора
Рис. 9. Итальянский аппарат "Плуто"
Рис. 10. Шведские подводные аппараты "Си Игл" и "Дабл Игл" (справа)
| Наименование, страна-разработчица | Размерения, м: длина, ширина, высота | Масса, кг: аппарата/заряда ВВ | Скорость, уз | Глубина погружения, м | Автономность | Радиус действия, м |
| ЕХ116 (MNS), США | 3,8 0,9 0,9 | 1130/44 | 6 | Более 100 | Неограниченная | 1000 |
| ARMS, США | 2,2 1,8 0,7 | 430/50 | 6 | 300 | - | 1000 |
| "Минноу". Великобритания | 2,1 0,9 1,2 | 395/127 | 7,5 | 200 | - | - |
| "Микров", Великобритания | 2,1 1,0 0,6 | 150/20 | 8 | 200 | - | 800 |
| "Трейл Блейзер". Великобритания, Канада | 2,6 0,6 0,9 | 765/4x50 или 1х127 | 6 (4 на глубине 90 м) | 500 | Около 200 ч | 1000 |
| "Пингвин-В3", ФРГ | 3,5 1,5 1,4 | 1350/2х130 | 6-8 | 100 | 2-3 ч | 1000 |
| "Пингвин А1". ФРГ | 3,7 1,0 - | - | 7 на глубине 10 м | 300 | 8-10 ч | 4000-5500 |
| РАР-104 Мк4. Франция | 2,7 1,2 1,3 | 700/127 | 5,5 | 300 | 5x20 мин | 500 |
| РАР-104 Мк5. Франция | 2,9 1,2 1,3 | 750/130 | 6 | 300 | 5х20 мин | 500 |
| МIN-77, Италия | 3,6 1,1 1,5 | 1300/120 | 5 | 150 | 15 мин | 1000 |
| "Плуто", Италия | 1,6 0,6 0,6 | 160/40 | 4 | 300-400 | 1-2 ч | 500 |
| SSM, Италия | 7,5 2,5 - | -/6х40 | 6 | Полупогруженный | - | - |
| "Си Игл", Швеция | 1,5 0,8 0,8 | 90/10 | 2,5 | 350 | Неограниченная | 350 |
| "Дабл Игл", Швеция | 1,7 1,3 0,4 | 200/40 | 5 | 350 | - | - |
| "Сопро", Испания | 2,0 - 0,4 | 150/- | 5 | - | - | - |